Энэ удаагийн нийтлэлээр хэдүүлээ хумсны толио чинээ хэмжээтэй яг л шавж шиг нисэж, мөлхөж, үсэрч чаддаг робот байвал яах вэ? юунд ашиглаж болох вэ? гэх талаар сонирхон судалцгаая.

2001 оны 9 сарын 11-нд Америкийн Нью Йорк хотод болсон аймшигт халдлагын үеэр аврах үйл ажиллагаа явуулахад тун хүндрэлтэй орчин нөхцөлд хайгуулын роботуудыг явуулах ажил эхлүүлсэн нь роботыг бодит орчинд ашигласан анхны тохиолдол болж байлаа. Гэвч тухайн роботууд нь маш олон сул талтай байсан юм.
- Баттерейний ажиллах хугацаа богино. (20 – 30 минут)
- Дохионы дамжуулалт муу.
- Болхи хийцтэй тул эвдрэх, гацах тохиолдол их.
- Бэлтгэгдсэн операторууд байгаагүй тул их хугацаа алдаж байсан гэх мэт олон асуудалтай байсан бөгөөд хайгуулын явцад нэг ч амьд хүн олж байгаагүй байна.
Тэгвэл яг л энэхүү салбарт робот шавж орж ирж байгаа юм. Аврал хайгуул хийх үүрэгтэй онцгой байдлын салбар нь робот шавжийн хөгжүүлэлт хийгдэх хамгийн том шалтгаануудын нэг мөнөөсөө мөн билээ. Ямар ч саадад түүртэлгүй, жижиг давчуу газруудаар явж аврах үйл ажиллагааг хэд дахин түргэсгэснээр маш олон хүмүүсийн амийг аврах боломжтой болно.
Гэхдээ робот шавж нь дөнгөж хөгжүүлэлтийн шатан дээрээ л явагдаж байна. Учир нь хумсны толио чинээ хэмжээтэй роботыг зүгээр л амархан тэжээл, мотор залгаад удирдах боломжгүй билээ. Хамгийн жижиг актуатор хүртэл роботоосоо том хэмжээтэй байгаа юм. Иймд шавж шиг хэмжээтэй, шавж шиг хөдлөх боломжтой робот хийнэ гэдэг нь бүгдийг тэгээс эхэлж байна л гэсэн үг. Энэ бол роботын салбарын сорилт шалгууруудаар дүүрэн цоо шинэ хөгжих нөөц юм. Энэхүү гайхалтай салбараар хэдүүлээ зочилцгооё.
RoboBee Harvard University

Harvard-ийн Их Сургуулийн Wyss хүрээлэн нь зөгийний хөдөлгөөнөөс санаа аван RoboBee гэх системийг боловсруулж байгаа юм. Энэхүү робот нь далавчаа 120 герцийн хурдаар дэвж чадах ба цаасны хавчаарын тал орчим хэмжээтэй, граммыг арав хуваасны нэгээс бага жинтэй байна. RoboBee-ийн хамгийн чухал гол онцлог нь тус робот нисэхдээ пьезоэлектрик дамжуулагч буюу цахилгаан орон үйлчлэх үед өргөжиж, агшдаг керамик туузыг ашигладагт байгаа юм. Пьезоэлектрик дамжуулагч ашиглан актуатор хийсэн нь маш гайхалтай шийдэл бөгөөд хоёр далавчийг тус тусад нь удирдах боломжтой нь тухайн роботыг хүссэнээрээ удирдах боломжийг олгодог байна.
Harvard Ambulatory MicroRobot
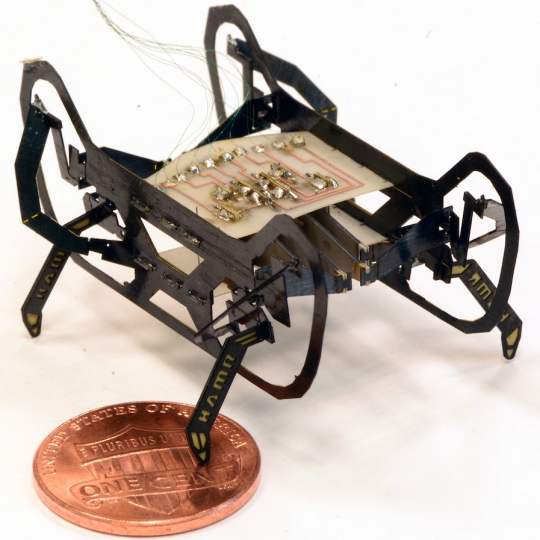
Дээрх зурагт үзүүлсэн HAMR робот нь жоомны хөдөлгөөнийг дуурайн үе мөч нь хөдлөх байдлаар загварчилсан бөгөөд RoboBee-тэй адилхан актуатор ашигладаг байна. Энэхүү робот нь 1.6 см-ын урттай ба өөрийнхөө биеийн уртаас даруй 4 дахин урт замыг 1 секундын дотор туулах чадамжтай мөн өөрөөсөө 2 дахин хүнд биетийг зөөх чадалтай робот юм. Арай сүүлийн загвар болох HAMR-E нь шагайндаа цахилгаан электрик ялтастай болсон бөгөөд түүнийхээ ачаар усан доор алхах, төмөр эд зүйлсэд соронзлогдон алхах боломжтой болсон байна. Ингэснээр онгоцны хөдөлгүүр болон ямарваа нэгэн төвөгтэй эд механизмыг задлах шаардлагагүйгээр шалгах боломжтой болох юм.
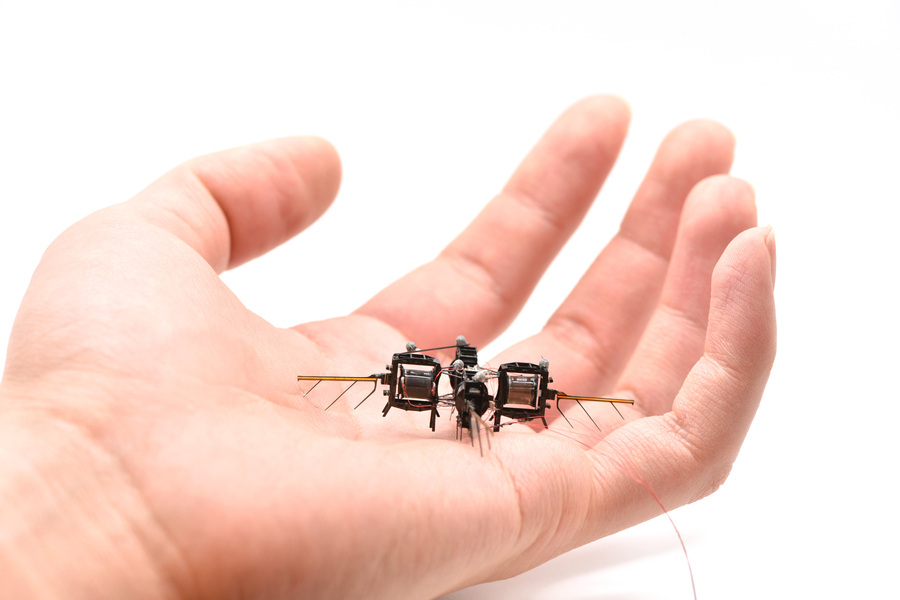
RoboFly University of Washington


RoboFly нь дэлхийн хамгийн анхны утасны холболтгүй бие даан ниссэн робот шавж юм. Роботыг тэжээхийн тулд нүдэнд үл үзэгдэх лазер бөөмөөр фотоволтайк ялтас руу бөмбөгддөг (дээрх зурагт улаанаар үзүүлсэн) байна. RoboFly нь шүдний чигчлүүрээс яльгүй хүнд ч гэсэн илүү өндөрт удаан хугацаагаар нисгэхэд хүнддэж байгаа юм. Лазераас хүлээн авч хувиргаж буй хүчдэл нь дөнгөж 7 вольт бөгөөд далавчийг хөдөлгөхөд хангалттай биш. Иймд хөгжүүлэлтийн баг хүчдэлийн өсгүүрийн хэлхээ зохиосон бөгөөд 7 вольтыг 240 вольт болгон өсгөж чадсан байна. Мөн хамгийн сонирхолтой нь тус роботдоо микроконтроллёр нэмж өгснөөр далавчаа удирдах боломжтой болжээ.

MIT Robot FireFly
MIT-ээс хөгжүүлж буй робот шавж. Тус робот нь диэлектрик эластомер актуатор ашигладгаараа онцлогтой ба тайлбарлавал хоёр электрод ялтсан дунд эластомер материал байрлах бөгөөд хүчдэл өгөх үед 2 ялтас хоорондоо татагдаж эластомер материал шахагдах ба хүчдэл өгөхөө болих агшинд тус материал нь буцаад тэлж булчин шиг ажиллана. Энэхүү хиймэл булчинг дээрх зурагт үзүүлсний дагуу ороож далавчаа холбосноор нисэх боломжтой болох юм. Робот нь маневр хийх чадамжтай ба бүр агаар дээр акробат эргэж чаддаг байна.
Робот шавж бол бидний мэдэх энгийн мэдрүүр, тэжээл, актуатортой робот биш юм. Тус роботын хөгжүүлэгчид маань өөрсдөө актуаторын шинэ шийдэл олж, хөдлөх механизмыг загварчилснаар одоо дөнгөж л нисэж, алхаж хөдөлж чаддаг болсон байна. Цаашаагаа тэжээл, мэдрүүр микроконтроллёроо шийдэх маш олон сорилтуудтай тулгарсан роботик инженер, доктор, профессоруудад маань хийх ажил, турших загварууд маш олон бий билээ. Магад та ч гэсэн энэ салбарт хүч үзэж өөрөө робот загварчилж, аль эсвэл дээрх дурдсан хөгжүүлэлтийн багт нэгдэж болно шүү дээ!
Доорх бичлэгээс илүү дэлгэрэнгүй тайлбарыг үзэж мэдлэгээ тэлээрэй😉.