Сүүлийн жилүүдэд роботын инженерийн салбарт “бодит биет байдал” (embodiment) гэх ойлголт чухал болж байгаа. Энэ нь зөвхөн роботын хөдөлгөөн төдийгүй, түүний биеийн хэлбэр, бүтэц, орчинтой харилцан үйлчлэх чадварыг харгалзан үздэг арга юм.
Японы Кюшю технологийн дээд сургуулийн профессор Хироаки Вагатсума болон түүний багийнхан хүний тархинд суурилсан роботын системийг бүтээж байгаа. Тэдний судалгааны гол зорилго нь хүний тархины ажиллагааг загварчлан, роботуудыг илүү ухаалаг, хүмүүст ойр болгох явдал юм.
Хүний биеийн дохио, хөдөлгөөнийг хэрхэн хэмжин авдаг вэ?
Судалгааны эхний хэсэгт хүний биеийн дотоод дохиог (нүдний хөдөлгөөн, тархины долгион, булчингийн хөдөлгөөн) хэрхэн хэмжиж, боловсруудах талаар авч үзсэн.
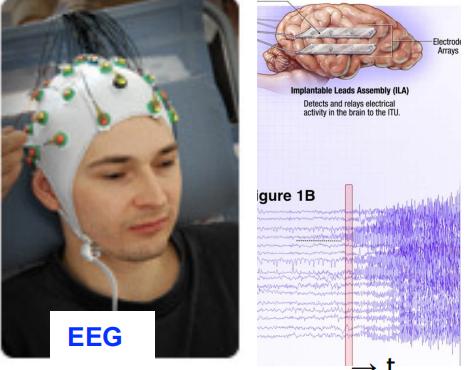
Хүний бие маш олон төрлийн дохиог ялгаруулдаг. Түүний нэг бол бидний тархи цахилгаан долгион ялгаруулдаг бөгөөд үүнийг электроэнцефалограмм (EEG) гэж нэрлэдэг. Энэ долгионыг тусгай мэдрэгчээр бичиж аван судалснаар хүн юу бодож байгааг ойлгож болдог. Дараагийнх гар, хөл хөдлөх үед булчингууд бага зэргийн цахилгаан гүйдэл ялгаруулдаг. Үүнийг электромиограмм (EMG) гэж нэрлэдэг. Энэ дохиог мөн адилаар судалснаар хүн ямар хөдөлгөөн хийх гэж байгааг робот урьдчилан таамаглах боломжийг олгодог. Сүүлд нь нүдний хөдөлгөөн ч бас маш чухал мэдээлэл өгдөг. Хүн юу руу харж байгаагаас нь тэр юунд анхаарлаа хандуулж байгааг олж мэдэх боломжтой ба эдгээр бүх дохиог нэгтгэснээр робот хүний бодол, зорилгыг ойлгож, туслах боломжтой болдог.
- Тархины долгион (EEG)
- Alpha долгион: Тайван байдал, анхаарлыг илэрхийлнэ
- Beta долгион: Идэвхтэй, сэтгэл хөдлөлтэй үед
- Theta долгион: Бүтээлч үйл ажиллагааг илэрхийлнэ
- Булчингийн идэвхжил (EMG)
- Гар, хөлийн хөдөлгөөнийг илэрхийлэл
- Хэр хэмжээний хүчийг зарцуулж байгааг
- Нүдний хөдөлгөөн
- Анхаарлын чиглэлийг тодорхойлно
- Сонирхол, анхаарал татсан үе
Эдгээр дохиог шинжлэх замаар робот хүний үйлдэл, зорилгыг урьдчилан таамаглах боломжтой болдог.
Тэгвэл эдгээр дохиог робот маань хэрхэн хүлээж авдаг вэ?
Судалгааны нэгэн сонирхолтой чиглэл бол хүн-роботын синхрон хөдөлгөөнийг бий болгох явдал юм. Үүний тулд “Төв Хэв маяг Үүсгэгч” (Central Pattern Generator – CPG) гэж нэрлэгддэг биологийн системийг загварчилсан. Энэ нь тархинд байдаг тодорхой хэв маягийн дагуу хөдөлгөөн үүсгэдэг нейрон сүлжээ юм.
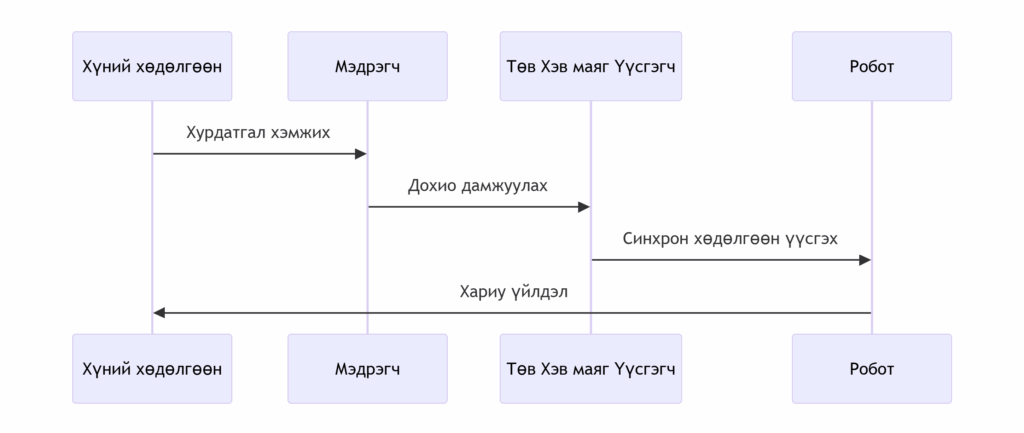
Хамгийн сонирхолтой зүйл нь роботууд хүмүүсийн хөдөлгөөний хэв маягийг суралцаж, тэдэнтэй синхрончлон (адилхан, дуурайх) хөдөлж чаддаг болсон. Роботын удирдлагын систем нь хүний биеийн дохиог дараах гурван алхмаар боловсруулдаг:
- Эхлээд, тусгай мэдрэгчүүд нь тархины долгион, булчингийн хөдөлгөөн, нүдний хөдөлгөөн зэрэг дохиог бичиж авдаг.
- Дараа нь, компьютер эдгээр дохиог шинжлэх ухаанаар батлагдсан аргаар судалж, хүн юу хийх гэж байгааг тайлбарлан таамаглал гаргана.
- Эцэст нь, робот энэ мэдээллийг ашиглан хүний хүсэл, хэрэгцээнд тохирсон хариу үйлдлийг гүйцэтгэдэг.
- Энэ бүх процесс нь маш хурдтай явагддаг тул робот бодит цаг хугацаанд хүнтэй харилцах боломжтой болдог.
Гар барих жишээ: Хүн роботын гар барих үед робот хүний гарын хөдөлгөөн, даралтыг мэдрээд, тохирох хариу үйлдлийг үзүүлнэ. Энэ нь яг л найзтайгаа гар барих мэт мэдрэмж төрүүлдэг
Нүдний хөдөлгөөн: Зарим роботууд хүний нүдний хөдөлгөөнийг мөн таньж чаддаг. Хүн юу руу харж байгаагаас нь тэр юунд анхаарлаа хандуулж байгааг олж мэдээд, түүнд туслах зүйлээ хийж болдог.
Сүүлд нь хүн ба роботын харилцааны технологи нь роботуудыг илүү ухаалаг, аюулгүй, хүнд ээлтэй болгох чиглэлээр хөгжиж байгаа. Хүний биений дохиог судлах, роботын хөдөлгөөнийг тасралтгүй системээр загварчлах, хүн-роботын синхрон хөдөлгөөнийг бий болгох зэрэг судалгаанууд нь ирээдүйд хүн роботуудтай илүү зохицон ажиллах боломжийг бүрдүүлэх зорилготой.